|
9451| 6
|
[入门教程] Micro:bit 45 小bit,向着明亮那方—追光小车 |
|
本帖最后由 rzyzzxw 于 2018-3-14 19:08 编辑 向着明亮那方  向着明亮那方。 哪怕一片叶子也要向着日光洒下的方向。 灌木丛中的小草啊。 向着明亮那方, 向着明亮那方。 哪怕烧焦了翅膀 也要飞向灯火闪烁的方向。 夜里的飞虫啊。 向着明亮那方 向着明亮那方。 哪怕只有分寸的宽敞也要向着阳光照射的方向。 住在都会的孩子们啊。  给孩子读绘本时,很喜欢金子美玲的这首诗,百读不厌。 忽然有一天,小bit告诉我,我要光。 好吧,小bit,一起向着明亮那方。  器材准备: 1、bit*1 2、df扩展板*1 3、360度舵机*2(有没有发现,用舵机驱动,其实很能装**) 4、光线传感器*2 5、线材若干 1、diy一个小车。 有小车直接改造也好,因为很享受diy的过程,所以我选择了diy。 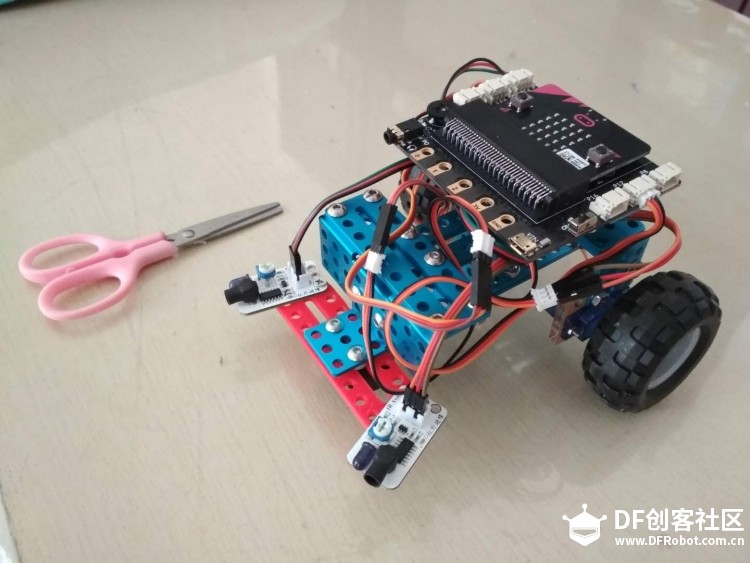 加上了小喵的电池,带电源管理芯片,可充电。 加上了小喵的电池,带电源管理芯片,可充电。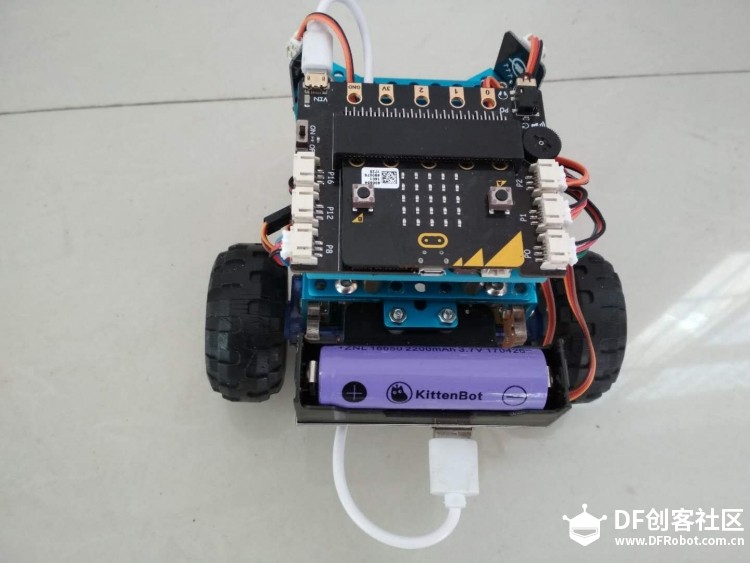 前面。 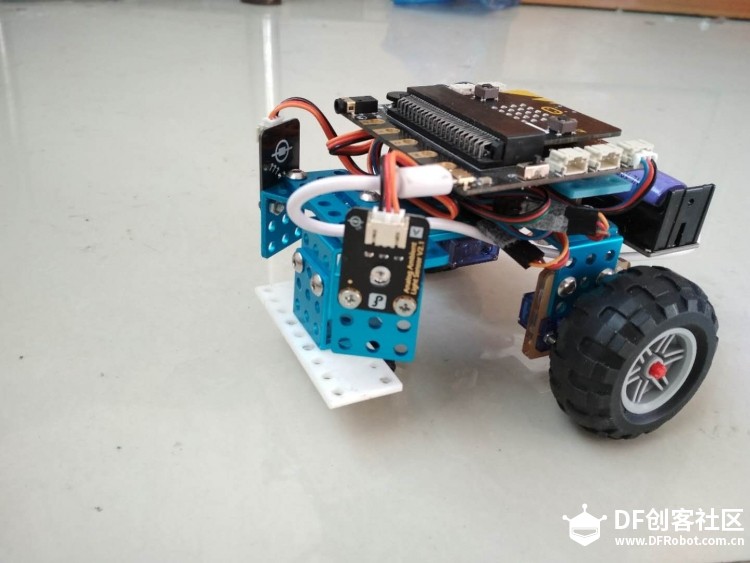 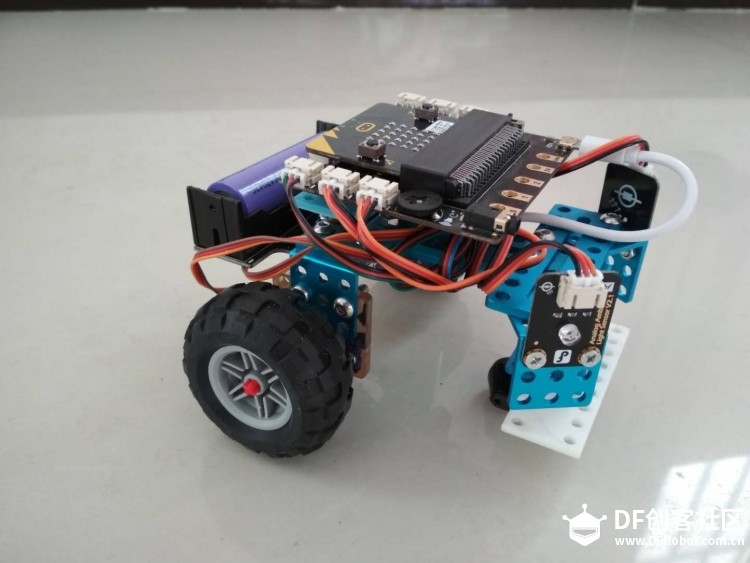 下面的白色3D打印件计划后面改装其它功能。 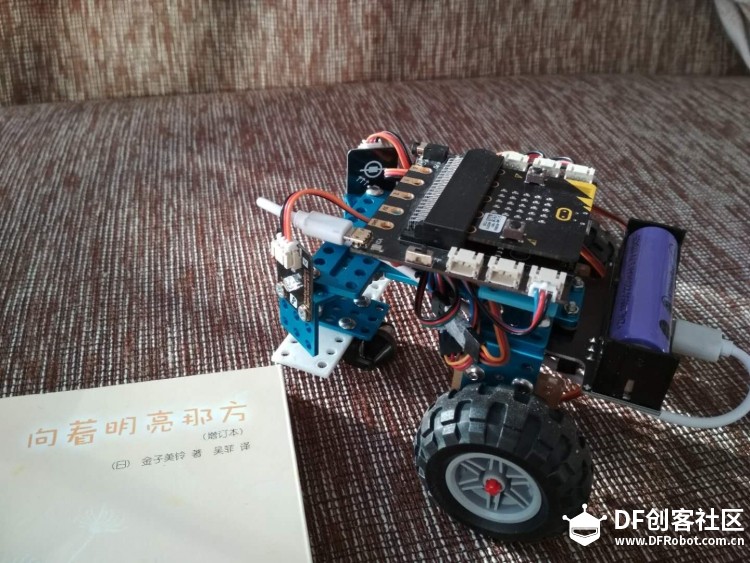 2、编程。 将在线编程网页切换到英文。因为我要用到舵机,而舵机积木有点问题。 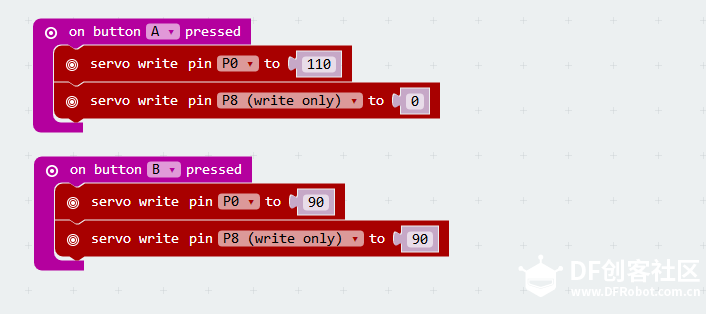 先编个测试左转的,这个是边走边左转的。 其它类似,自己写吧。 360度舵机控制方法,当设为90时为停止,向0和180值越大转速越大。 我的左边舵机接P0,右边舵机P8,舵机线用排针和数据线连接并用胶带粘紧。 光线传感器左边接P1,右边P2。 定义几个函数。  当左侧光线强时边左转边前行,右边强时边右转边前行,相等时前行(这个基本没用)。 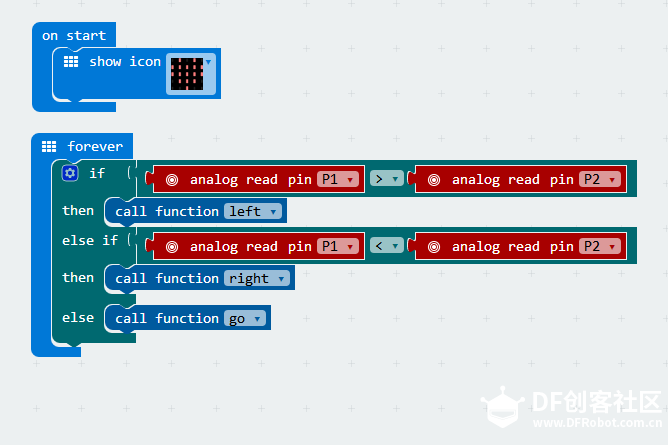 3、上传测试,成功 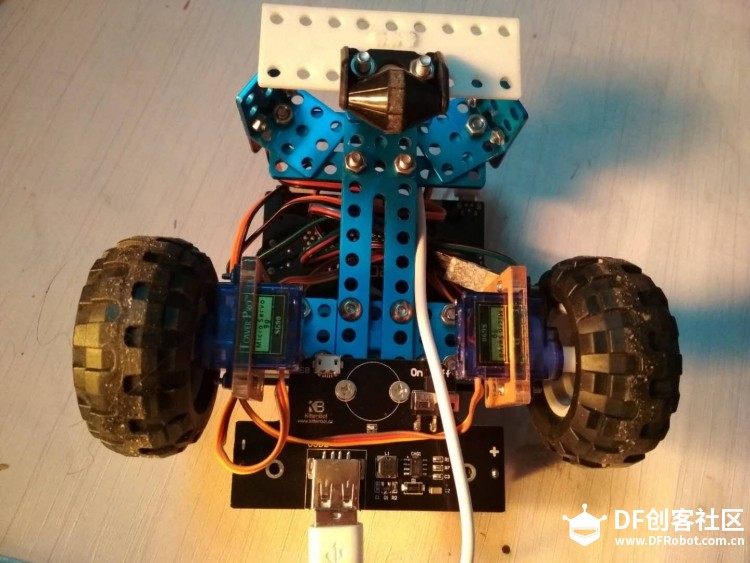 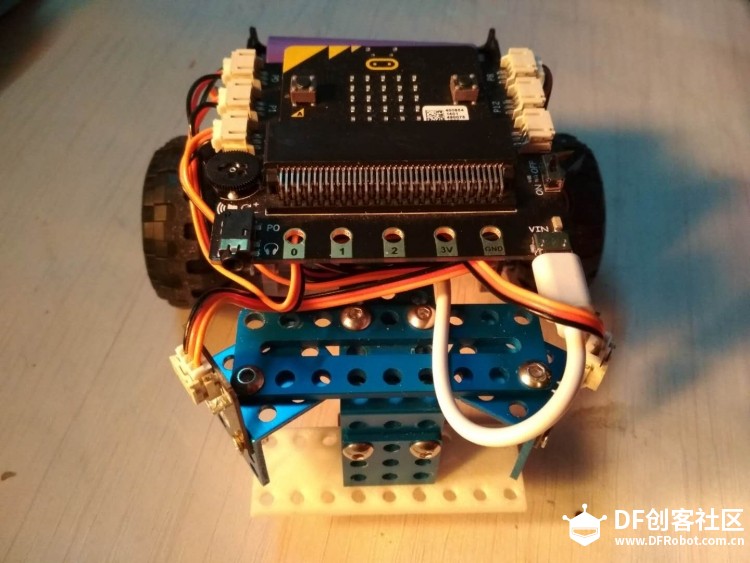 |
 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2025 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶



 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 牛X认证
牛X认证
 老版主限定
老版主限定
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 物联网挑战
物联网挑战
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 创客造
创客造
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖