本帖最后由 云天 于 2022-5-21 08:32 编辑
想测试一下自己的颜值,但结果哭了。下面开始。
【三庭五眼】
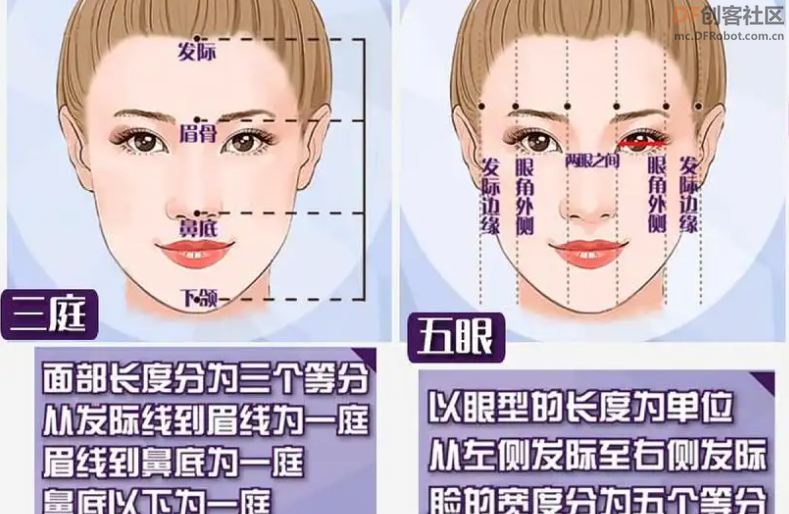
三庭:指脸的长度比例,把脸的长度分为三个等分,从前额发际线至眉骨,从眉骨至鼻底,从鼻底至下颏,各占脸长的1/3。
五眼:指脸的宽度比例,以眼形长度为单位,把脸的宽度分成五个等分,从左侧发际至右侧发际,为五只眼形。两只眼睛之间有一只眼睛的间距,两眼外侧至侧发际各为一只眼睛的间距,各占比例的1/5。
“三庭五眼”是人的脸长与脸宽的一般标准比例,不符合此比例,就会与理想的脸型产生距离。
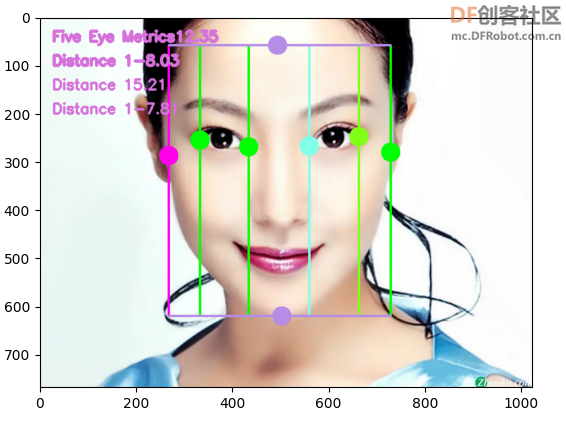
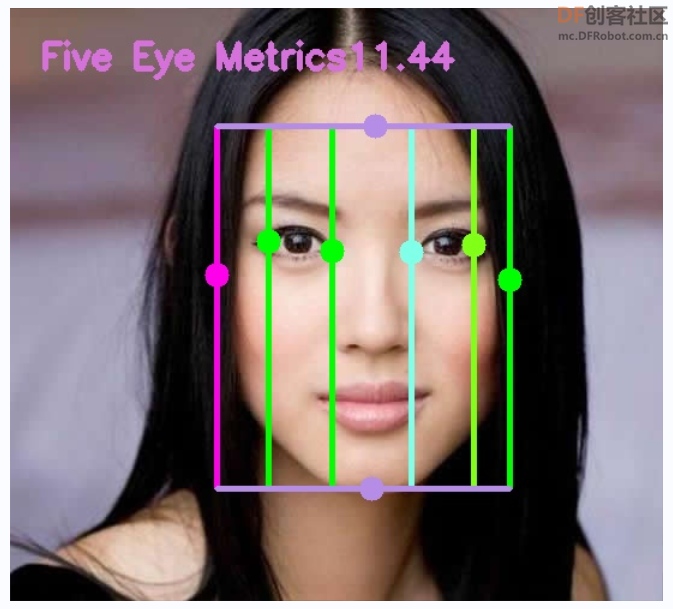
本演示只使用了“五眼”,重点是学习“范数”。
【范数】
通过Mediapipe获取脸上关键点轮廓的坐标,再计算这五个距离,如何最终使用一个量作为比较值,我使用“范数”。
范数主要是对矩阵和向量的一种描述,有了描述那么“大小就可以比较了”,从字面理解一种比较构成规范的数。有了统一的规范,就可以比较了。
例如:1比2小我们一目了然,可是(3,5,3)和(6,1,2)哪个大?不太好比吧
2范数比:根号(43)比根号(41)大,因此2范数对比中(3,5,3)大
无穷范数比:5比6小,因此无穷范数对比中(6,1,2)大
矩阵范数:描述矩阵引起变化的大小,AX=B,矩阵X变化了A个量级,然后成为了B。
向量范数:描述向量在空间中的大小。
更一般地可以认为范数可以描述两个量之间的距离关系。
向量范数的通用公式为L-P范数
记住该公式其他公式都是该公式的引申。
L-0范数:用来统计向量中非零元素的个数。
L-1范数:向量中所有元素的绝对值之和。可用于优化中去除没有取值的信息,又称稀疏规则算子。
L-2范数:典型应用——欧式距离。可用于优化正则化项,避免过拟合。
L-∞范数:计算向量中的最大值。
————————————————
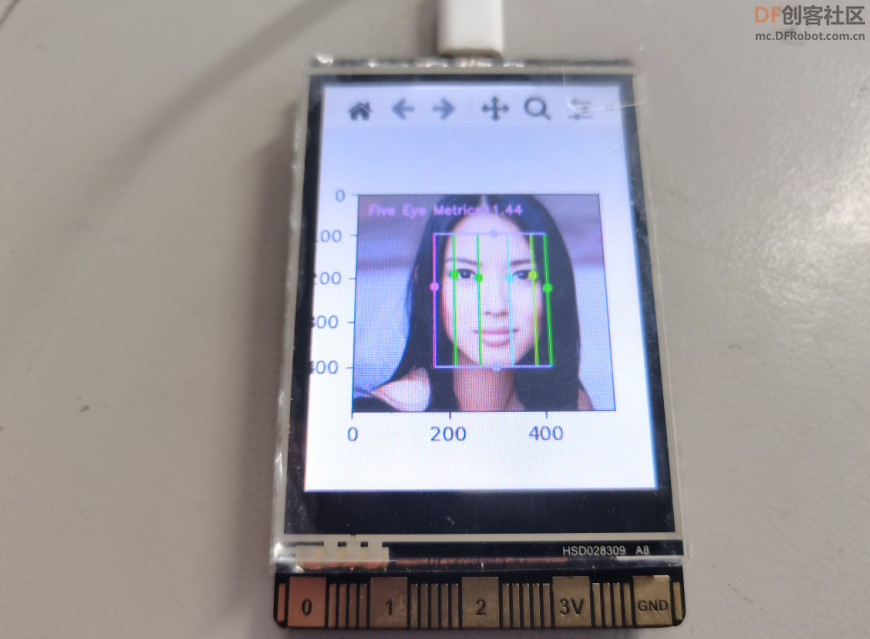
 -范数的定义 -范数的定义 -范数表示向量(或矩阵)的元素平方和开根号,即 【图片颜值测试】 python计算范数 np.linalg.norm
-
- # 颜值打分--五眼指标
- import cv2 as cv
- import mediapipe as mp
- import numpy as np
-
- import time
- import matplotlib.pyplot as plt
-
- # 定义可视化图像函数
- def look_img(img):
- img_RGB=cv.cvtColor(img,cv.COLOR_BGR2RGB)
- plt.imshow(img_RGB)
- plt.show()
-
- # 导入三维人脸关键点检测模型
- mp_face_mesh=mp.solutions.face_mesh
- # help(mp_face_mesh.FaceMesh)
-
- model=mp_face_mesh.FaceMesh(
- static_image_mode=True,#TRUE:静态图片/False:摄像头实时读取
-
- max_num_faces=40,
- min_detection_confidence=0.5, #置信度阈值,越接近1越准
- min_tracking_confidence=0.5,#追踪阈值
- )
-
-
- # 导入可视化函数和可视化样式
- mp_drawing=mp.solutions.drawing_utils
- # mp_drawing_styles=mp.solutions.drawing_styles
- draw_spec=mp_drawing.DrawingSpec(thickness=2,circle_radius=1,color=[66,77,229])
-
- img=cv.imread("face.jpg")
-
-
- # 将图像模型输入,获取预测结果
-
- # BGR转RGB
- img_RGB=cv.cvtColor(img,cv.COLOR_BGR2RGB)
- scaler=1
- h,w=img.shape[0],img.shape[1]
- # 将RGB图像输入模型,获取预测结果
- r=10
- results=model.process(img_RGB)
- # # 预测人人脸个数
-
-
- # 连轮廓最左侧点
- FL=results.multi_face_landmarks[0].landmark[234];
- FL_X,FL_Y=int(FL.x*w),int(FL.y*h);FL_Color=(234,0,255)
- img=cv.circle(img,(FL_X,FL_Y),r,FL_Color,-1)
-
-
-
- # 脸上侧边缘
- FT=results.multi_face_landmarks[0].landmark[10];# 10 坐标为上图中标注的点的序号
- FT_X,FT_Y=int(FT.x*w),int(FT.y*h);FT_Color=(231,141,181)
- img=cv.circle(img,(FT_X,FT_Y),r,FT_Color,-1)
-
-
-
- # 下侧边缘
- FB=results.multi_face_landmarks[0].landmark[152];# 152 坐标为上图中标注的点的序号
- FB_X,FB_Y=int(FB.x*w),int(FB.y*h);FB_Color=(231,141,181)
- img=cv.circle(img,(FB_X,FB_Y),r,FB_Color,-1)
-
-
- # 右侧
- FR=results.multi_face_landmarks[0].landmark[454];# 454 坐标为上图中标注的点的序号
- FR_X,FR_Y=int(FR.x*w),int(FR.y*h);FR_Color=(0,255,0)
- img=cv.circle(img,(FR_X,FR_Y),r,FR_Color,-1)
-
-
- # 左眼左眼角
- ELL=results.multi_face_landmarks[0].landmark[33];# 33坐标为上图中标注的点的序号
- ELL_X,ELL_Y=int(ELL.x*w),int(ELL.y*h);ELL_Color=(0,255,0)
- img=cv.circle(img,(ELL_X,ELL_Y),r,ELL_Color,-1)
-
-
- #左眼右眼角
- ELR=results.multi_face_landmarks[0].landmark[133];# 133坐标为上图中标注的点的序号
- ELR_X,ELR_Y=int(ELR.x*w),int(ELR.y*h);ELR_Color=(0,255,0)
- img=cv.circle(img,(ELR_X,ELR_Y),r,ELR_Color,-1)
-
-
- # 右眼左眼角362
- ERL=results.multi_face_landmarks[0].landmark[362];# 133坐标为上图中标注的点的序号
- ERL_X,ERL_Y=int(ERL.x*w),int(ERL.y*h);ERL_Color=(233,255,128)
- img=cv.circle(img,(ERL_X,ERL_Y),r,ERL_Color,-1)
-
-
- # 右眼右眼角263
- ERR=results.multi_face_landmarks[0].landmark[263];# 133坐标为上图中标注的点的序号
- ERR_X,ERR_Y=int(ERR.x*w),int(ERR.y*h);ERR_Color=(23,255,128)
- img=cv.circle(img,(ERR_X,ERR_Y),r,ERR_Color,-1)
-
-
-
- # 从左往右六个点的横坐标
- Six_X=np.array([FL_X,ELL_X,ELR_X,ERL_X,ERR_X,FR_X])
-
- # 从最左到最右的距离
- Left_Right=FR_X-FL_X
- # 从左向右六个点的间隔的五个距离一并划归
- Five_Distance=100*np.diff(Six_X)/Left_Right
-
- # 两眼宽度的平均值
- Eye_Width_Mean=np.mean((Five_Distance[1],Five_Distance[3]))
-
- # 五个距离分别与两眼宽度均值的差
- Five_Eye_Diff=Five_Distance-Eye_Width_Mean
-
- # 求L2范数,作为颜值的指标
- Five_Eye_Metrics=np.linalg.norm(Five_Eye_Diff)
-
- cv.line(img,(FL_X,FT_Y),(FL_X,FB_Y),FL_Color,3)
- cv.line(img,(ELL_X,FT_Y),(ELL_X,FB_Y),ELL_Color,3)
- cv.line(img,(ELR_X,FT_Y),(ELR_X,FB_Y),ELR_Color,3)
- cv.line(img,(ERL_X,FT_Y),(ERL_X,FB_Y),ERL_Color,3)
- cv.line(img,(ERR_X,FT_Y),(ERR_X,FB_Y),ERR_Color,3)
- cv.line(img,(FR_X,FT_Y),(FR_X,FB_Y),FR_Color,3)
- cv.line(img,(FL_X,FT_Y),(FR_X,FT_Y),FT_Color,3)
- cv.line(img,(FL_X,FB_Y),(FR_X,FB_Y),FB_Color,3)
-
- scaler=1
- img = cv.putText(img, 'Five Eye Metrics{:.2f}'.format(Five_Eye_Metrics), (25, 50), cv.FONT_HERSHEY_SIMPLEX, 1,(218, 112, 214), 4, 6)
- #img = cv.putText(img, 'Distance 1{:.2f}'.format(Five_Eye_Diff[0]), (25, 100), cv.FONT_HERSHEY_SIMPLEX, 1,(218, 112, 214), 5, 5)
- #img = cv.putText(img, 'Distance 1{:.2f}'.format(Five_Eye_Diff[2]), (25, 150), cv.FONT_HERSHEY_SIMPLEX, 1,(218, 112, 214), 4, 4)
- #img = cv.putText(img, 'Distance 1{:.2f}'.format(Five_Eye_Diff[4]), (25, 200), cv.FONT_HERSHEY_SIMPLEX,1,(218, 112, 214), 3, 4)
- look_img(img)
- cv.imwrite("yanzhi.jpg",img)
-
【行空板】
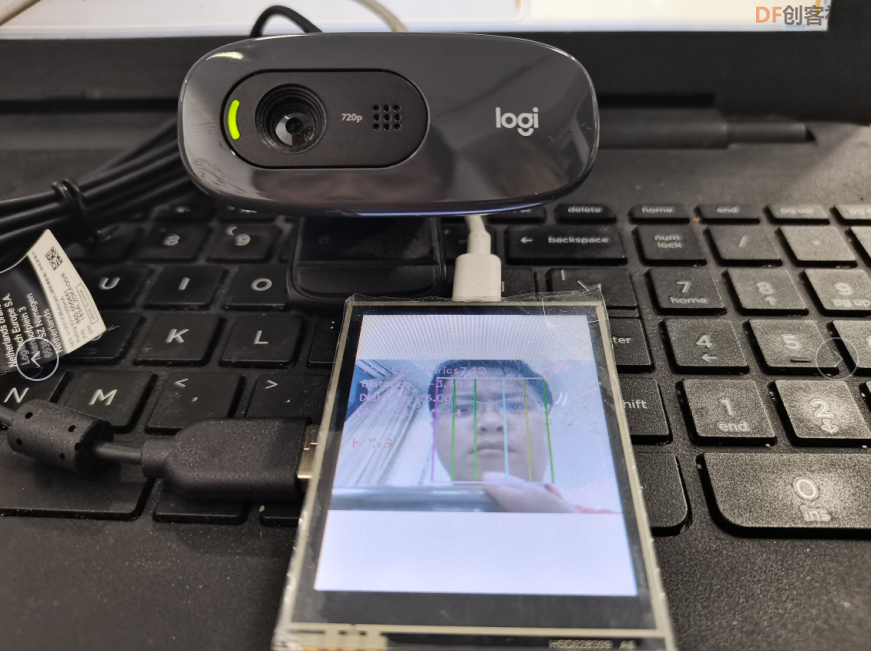
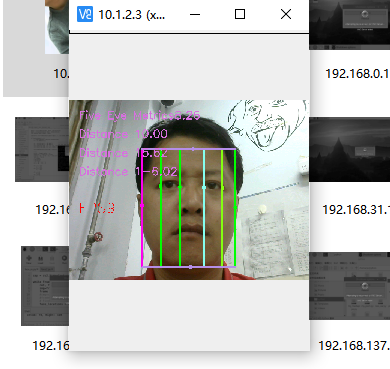
【实时摄像头】
-
- import cv2 as cv
- import mediapipe as mp
- import numpy as np
-
- import time
- import matplotlib.pyplot as plt
-
- # 定义可视化图像函数
- def look_img(img):
- img_RGB=cv.cvtColor(img,cv.COLOR_BGR2RGB)
- plt.imshow(img_RGB)
- plt.show()
-
- # 导入三维人脸关键点检测模型
- mp_face_mesh=mp.solutions.face_mesh
- # help(mp_face_mesh.FaceMesh)
-
- model=mp_face_mesh.FaceMesh(
- static_image_mode=False,#TRUE:静态图片/False:摄像头实时读取
-
- max_num_faces=5,
- min_detection_confidence=0.5, #置信度阈值,越接近1越准
- min_tracking_confidence=0.5,#追踪阈值
- )
-
-
- # 导入可视化函数和可视化样式
- mp_drawing=mp.solutions.drawing_utils
- # mp_drawing_styles=mp.solutions.drawing_styles
- draw_spec=mp_drawing.DrawingSpec(thickness=2,circle_radius=1,color=[66,77,229])
- landmark_drawing_spec=mp_drawing.DrawingSpec(thickness=1,circle_radius=2,color=[66,77,229])
- # 轮廓可视化
- connection_drawing_spec=mp_drawing.DrawingSpec(thickness=2,circle_radius=1,color=[233,155,6])
-
-
-
- # 处理帧函数
- def process_frame(img):
- start_time = time.time()
- scaler = 1
- h, w = img.shape[0], img.shape[1]
- img_RGB = cv.cvtColor(img, cv.COLOR_BGR2RGB)
- results = model.process(img_RGB)
- if results.multi_face_landmarks:
- # for face_landmarks in results.multi_face_landmarks:
- # 连轮廓最左侧点
- FL = results.multi_face_landmarks[0].landmark[234];
- FL_X, FL_Y = int(FL.x * w), int(FL.y * h);
- FL_Color = (234, 0, 255)
- img = cv.circle(img, (FL_X, FL_Y), 5, FL_Color, -1)
-
- # 左眼左眼角
- ELL = results.multi_face_landmarks[0].landmark[33]; # 33坐标为上图中标注的点的序号
- ELL_X, ELL_Y = int(ELL.x * w), int(ELL.y * h);
- ELL_Color = (0, 255, 0)
- img = cv.circle(img, (ELL_X, ELL_Y), 5, ELL_Color, -1)
-
-
- # 左眼右眼角
- ELR = results.multi_face_landmarks[0].landmark[133]; # 133坐标为上图中标注的点的序号
- ELR_X, ELR_Y = int(ELR.x * w), int(ELR.y * h);
- ELR_Color = (0, 255, 0)
- img = cv.circle(img, (ELR_X, ELR_Y), 5, ELR_Color, -1)
-
-
- # 右眼左眼角362
- ERL = results.multi_face_landmarks[0].landmark[362]; # 133坐标为上图中标注的点的序号
- ERL_X, ERL_Y = int(ERL.x * w), int(ERL.y * h);
- ERL_Color = (233, 255, 128)
- img = cv.circle(img, (ERL_X, ERL_Y), 5, ERL_Color, -1)
-
-
- # 右眼右眼角263
- ERR = results.multi_face_landmarks[0].landmark[263]; # 133坐标为上图中标注的点的序号
- ERR_X, ERR_Y = int(ERR.x * w), int(ERR.y * h);
- ERR_Color = (23, 255, 128)
- img = cv.circle(img, (ERR_X, ERR_Y), 5, ERR_Color, -1)
-
- # 轮廓最右侧
- FR = results.multi_face_landmarks[0].landmark[454]; # 454 坐标为上图中标注的点的序号
- FR_X, FR_Y = int(FR.x * w), int(FR.y * h);
- FR_Color = (0, 255, 0)
- img = cv.circle(img, (FR_X, FR_Y), 5, FR_Color, -1)
-
- # 脸上侧边缘
- FT = results.multi_face_landmarks[0].landmark[10]; # 10 坐标为上图中标注的点的序号
- FT_X, FT_Y = int(FT.x * w), int(FT.y * h);
- FT_Color = (231, 141, 181)
- img = cv.circle(img, (FT_X, FT_Y), 5, FT_Color, -1)
-
- # 脸下侧边缘
- FB = results.multi_face_landmarks[0].landmark[152]; # 152 坐标为上图中标注的点的序号
- FB_X, FB_Y = int(FB.x * w), int(FB.y * h);
- FB_Color = (231, 141, 181)
- img = cv.circle(img, (FB_X, FB_Y), 5, FB_Color, -1)
-
- # 从左往右六个点的横坐标
- Six_X = np.array([FL_X, ELL_X, ELR_X, ERL_X, ERR_X, FR_X])
-
- # 从最左到最右的距离
- Left_Right = FR_X - FL_X
- # 从左向右六个点的间隔的五个距离一并划归
- Five_Distance = 100 * np.diff(Six_X) / Left_Right
-
- # 两眼宽度的平均值
- Eye_Width_Mean = np.mean((Five_Distance[1], Five_Distance[3]))
-
- # 五个距离分别与两眼宽度均值的差
- Five_Eye_Diff = Five_Distance - Eye_Width_Mean
-
- # 求L2范数,作为颜值的指标
- Five_Eye_Metrics = np.linalg.norm(Five_Eye_Diff)
-
- cv.line(img, (FL_X, FT_Y), (FL_X, FB_Y), FL_Color, 3)
- cv.line(img, (ELL_X, FT_Y), (ELL_X, FB_Y), ELL_Color, 3)
- cv.line(img, (ELR_X, FT_Y), (ELR_X, FB_Y), ELR_Color, 3)
- cv.line(img, (ERL_X, FT_Y), (ERL_X, FB_Y), ERL_Color, 3)
- cv.line(img, (ERR_X, FT_Y), (ERR_X, FB_Y), ERR_Color, 3)
- cv.line(img, (FR_X, FT_Y), (FR_X, FB_Y), FR_Color, 3)
- cv.line(img, (FL_X, FT_Y), (FR_X, FT_Y), FT_Color, 3)
- cv.line(img, (FL_X, FB_Y), (FR_X, FB_Y), FB_Color, 3)
-
- scaler = 1
- #五眼指标
- img = cv.putText(img, 'Five Eye Metrics{:.2f}'.format(Five_Eye_Metrics), (25, 50), cv.FONT_HERSHEY_SIMPLEX,
- 1,
- (218, 112, 214), 2, 6)
- img = cv.putText(img, 'Distance 1{:.2f}'.format(Five_Eye_Diff[0]), (25, 100), cv.FONT_HERSHEY_SIMPLEX, 1,
- (218, 112, 214), 2, 5)
- img = cv.putText(img, 'Distance 1{:.2f}'.format(Five_Eye_Diff[2]), (25, 150), cv.FONT_HERSHEY_SIMPLEX, 1,
- (218, 112, 214), 2, 4)
- img = cv.putText(img, 'Distance 1{:.2f}'.format(Five_Eye_Diff[4]), (25, 200), cv.FONT_HERSHEY_SIMPLEX, 1,
- (218, 112, 214), 2, 4)
-
-
- else:
- img = cv.putText(img, 'NO FACE DELECTED', (25, 50), cv.FONT_HERSHEY_SIMPLEX, 1.25,
- (218, 112, 214), 1, 8)
-
- # 记录该帧处理完毕的时间
- end_time = time.time()
- # 计算每秒处理图像的帧数FPS
- FPS = 1 / (end_time - start_time)
- scaler = 1
- img = cv.putText(img, 'FPS' + str(int(FPS)), (25 * scaler, 300 * scaler), cv.FONT_HERSHEY_SIMPLEX,
- 1.25 * scaler, (0, 0, 255), 1, 8)
- return img
-
- # 调用摄像头
- cap=cv.VideoCapture(0)
-
-
- cap.set(cv.CAP_PROP_FRAME_WIDTH, 320)
- cap.set(cv.CAP_PROP_FRAME_HEIGHT, 240)
- cap.set(cv.CAP_PROP_BUFFERSIZE, 1)
- cv.namedWindow('my_window',cv.WND_PROP_FULLSCREEN) #Set the windows to be full screen.
- cv.setWindowProperty('my_window', cv.WND_PROP_FULLSCREEN, cv.WINDOW_FULLSCREEN) #Set the windows to be full screen.
-
- cap.open(0)
- # 无限循环,直到break被触发
- while cap.isOpened():
- success,frame=cap.read()
- # if not success:
- # print('ERROR')
- # break
- frame=process_frame(frame)
- #展示处理后的三通道图像
- cv.imshow('my_window',frame)
- if cv.waitKey(1) &0xff==ord('q'):
- break
-
- cap.release()
- cv.destroyAllWindows()
-
-

【演示视频】
|



 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 活跃会员
活跃会员
 宣传大使
宣传大使
 创客造
创客造
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖