SiRo 2.0: 价廉物美的 3D 打印 Micro:bit 机器人
## SiRo 2.0: 价廉物美的 3D 打印 Micro:bit 机 器人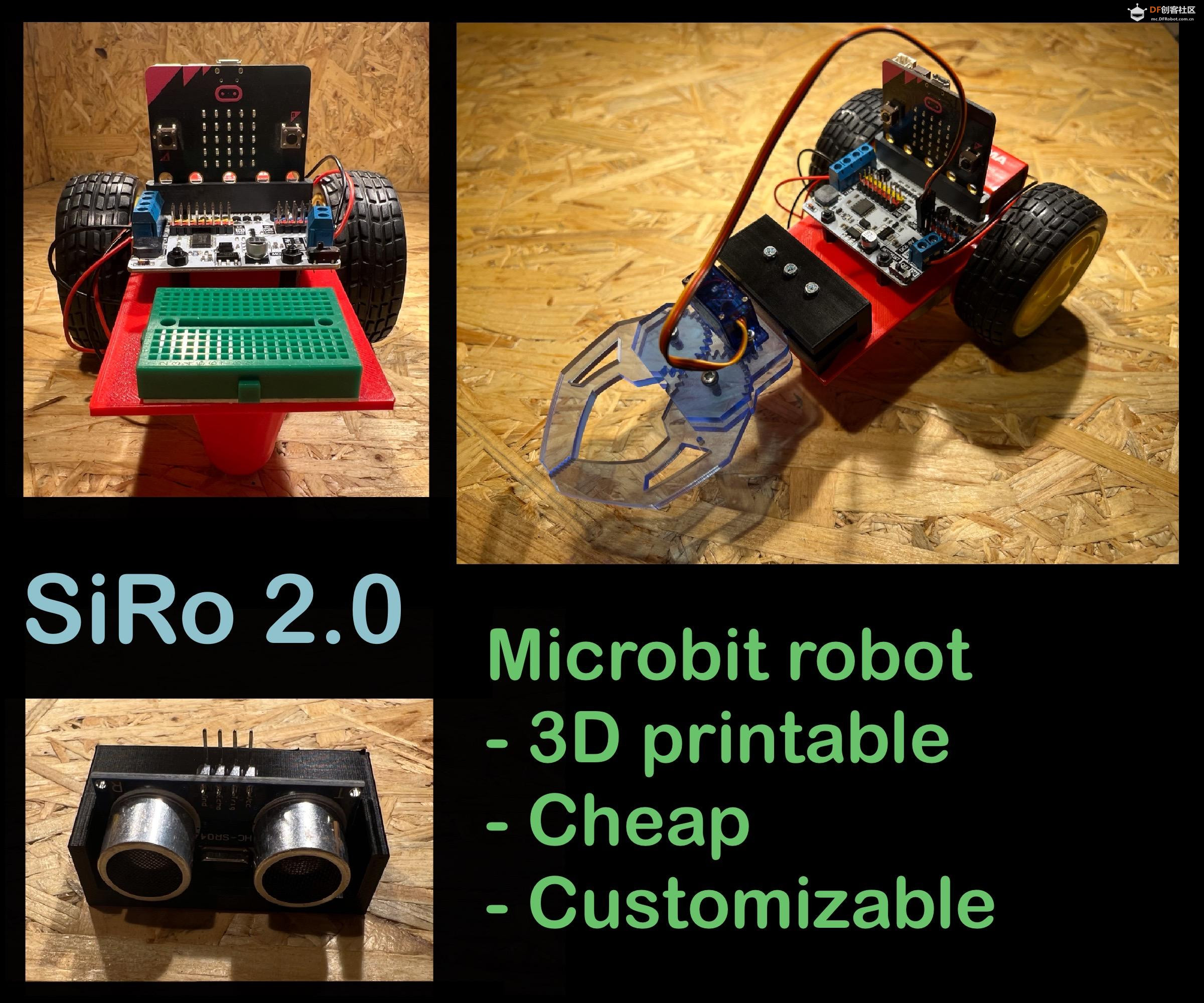
## 项目背景
在将 SiRo 重新设计为 SiRoAT 时,我被迫对机架进行一些更改,以便安装前置的 ESP32 相机。我意识到可以利用这些更改并使用安装系统,以便可以在 SiRo 上安装不同的传感器和模块。因此,SiRo 2.0应运而生。
SiRo 2.0 的打印速度比 SiRo 要慢,但不需要底座轮,它能够在前面安装不同的传感器和模块。我自己制作了一些本项目使用的模块。不过,就算您要设计自己的模块也相当简单。
## 材料清单

**硬件:**
- Micro:bit
- Motorbit
- 4 x M3 30mm螺钉
- 2 x M3 6mm螺钉
- 4 x M3间隔柱
- 8 x M3螺母
- 2 x TT130电机
- 2 x TT130电机的车轮
- L298N双H桥电机控制器
- 1 x 9伏电池+电池座
- 一点电线。最好使用两种不同颜色的电线
- 一小片双面胶带
- 3D打印机的填料
**工具:**
- 3D打印机
- 焊铁
- 螺丝刀
- 剥线器
## 步骤 1:打印机架
首先是使用您常用的切片软件切割 stl 文件并打印机架。
## 步骤 2:

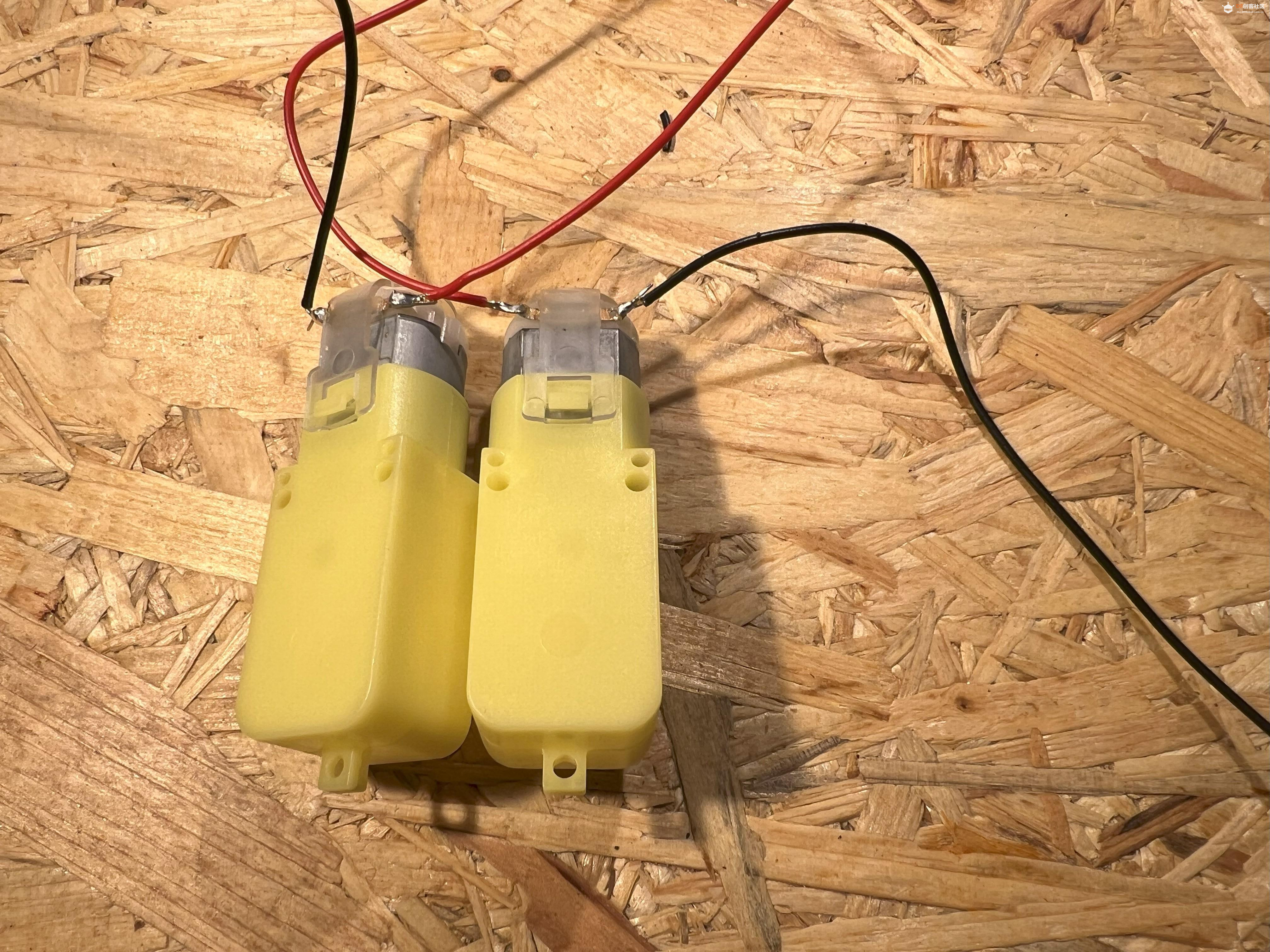
在等待 3D 打印机的时候,您可以开始在电机上焊接电线。取 4 根长度为 12 厘米电线,剥开电线并将其焊接到电机上。如果可能的话,建议使用两种不同颜色的电线,这样更容易区分它们。
## 步骤 3:


现在,我们取 2 x 6mm 螺丝、4 个间隔柱(我用 8mm 长的),4 个螺母和 Motorbit。首先,在 Motorbit 上安装 4 个间隔柱,然后用4个螺母固定。
然后使用 2 颗螺丝将其安装在底盘上。
## 步骤 4:安装电机

接着,我们需要 4 x 30mm 螺丝、4 个螺母和电机。
按照图片所示安装电机。
## 步骤 5:连接电机和电池
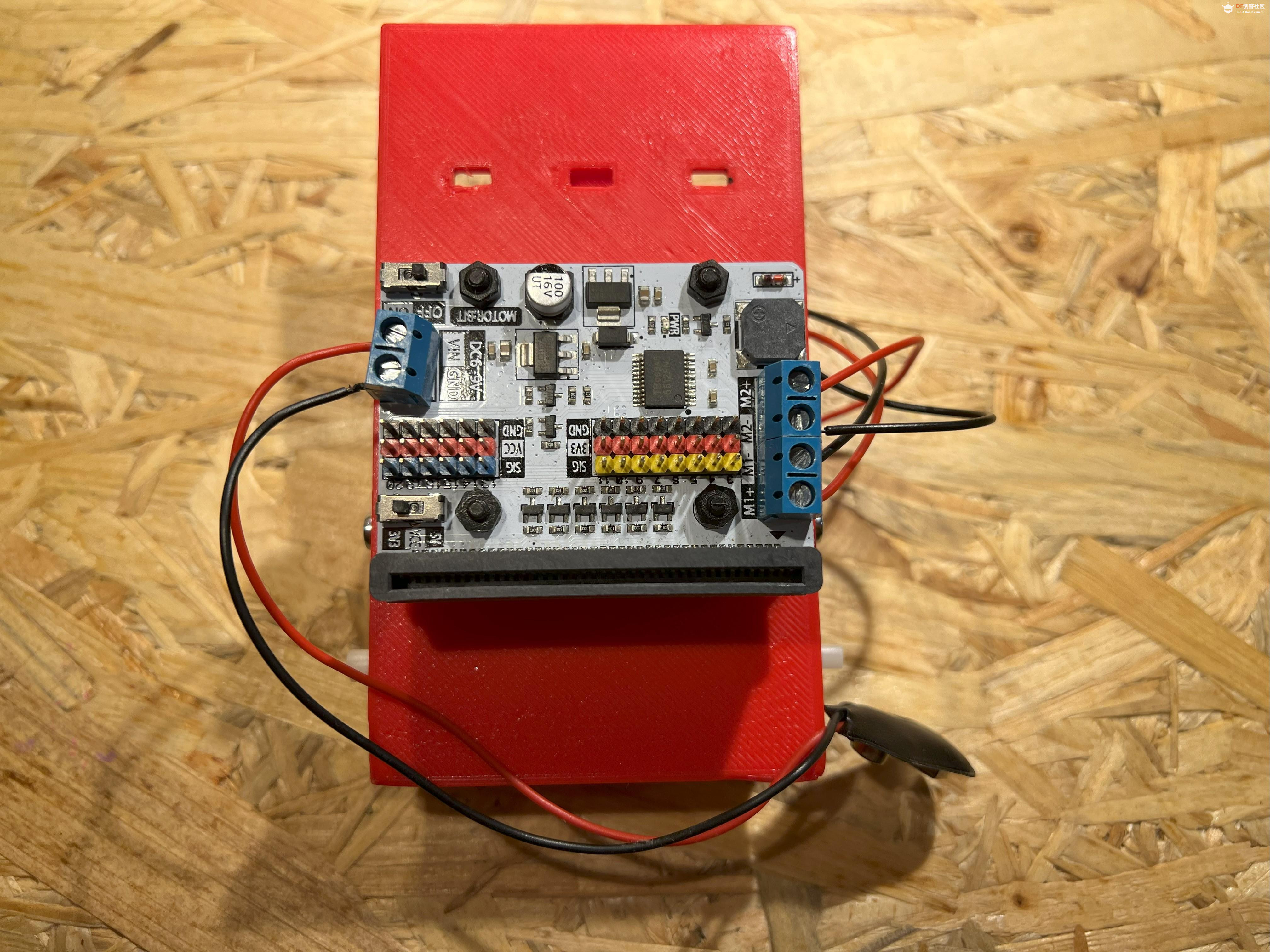
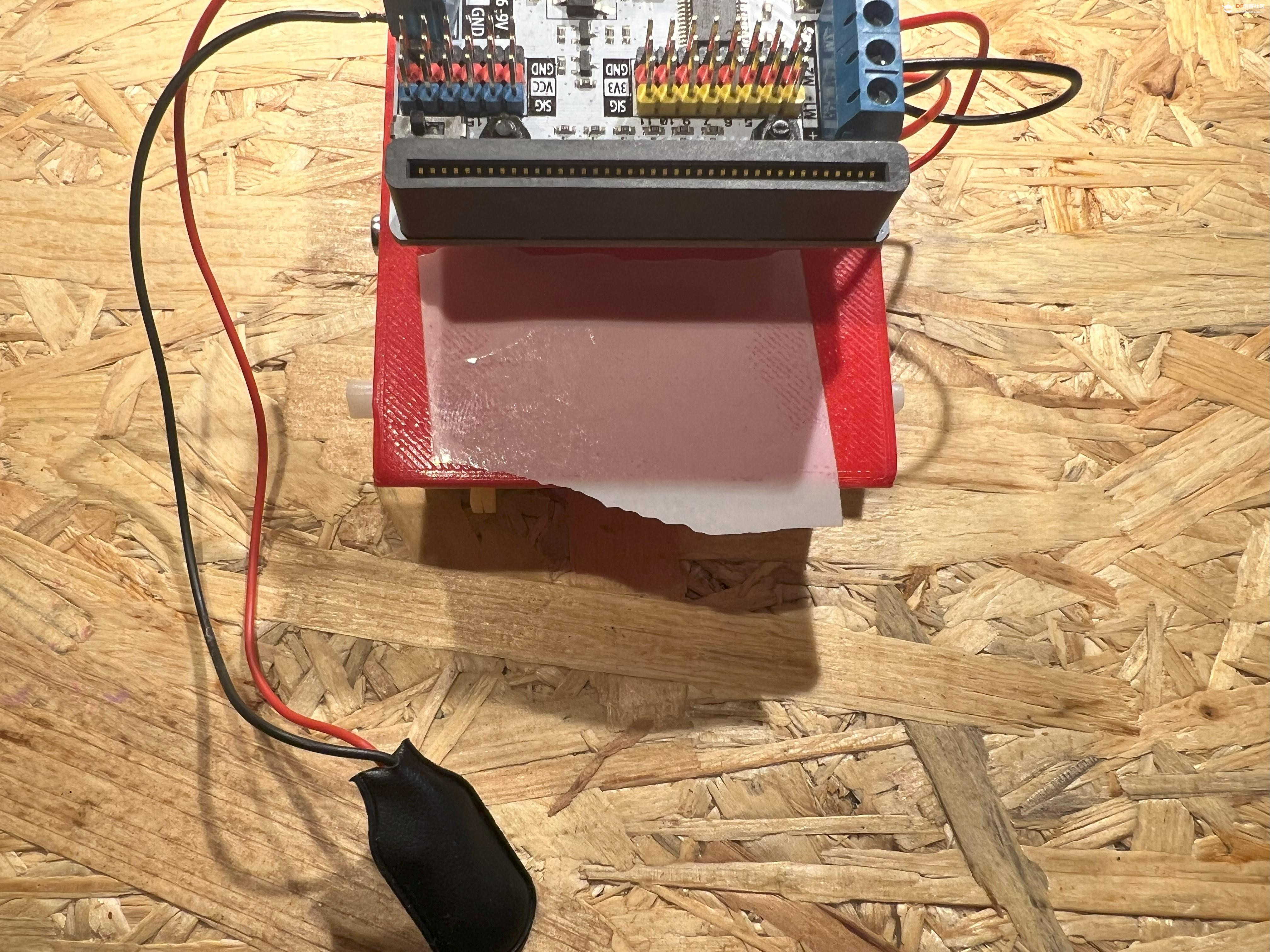
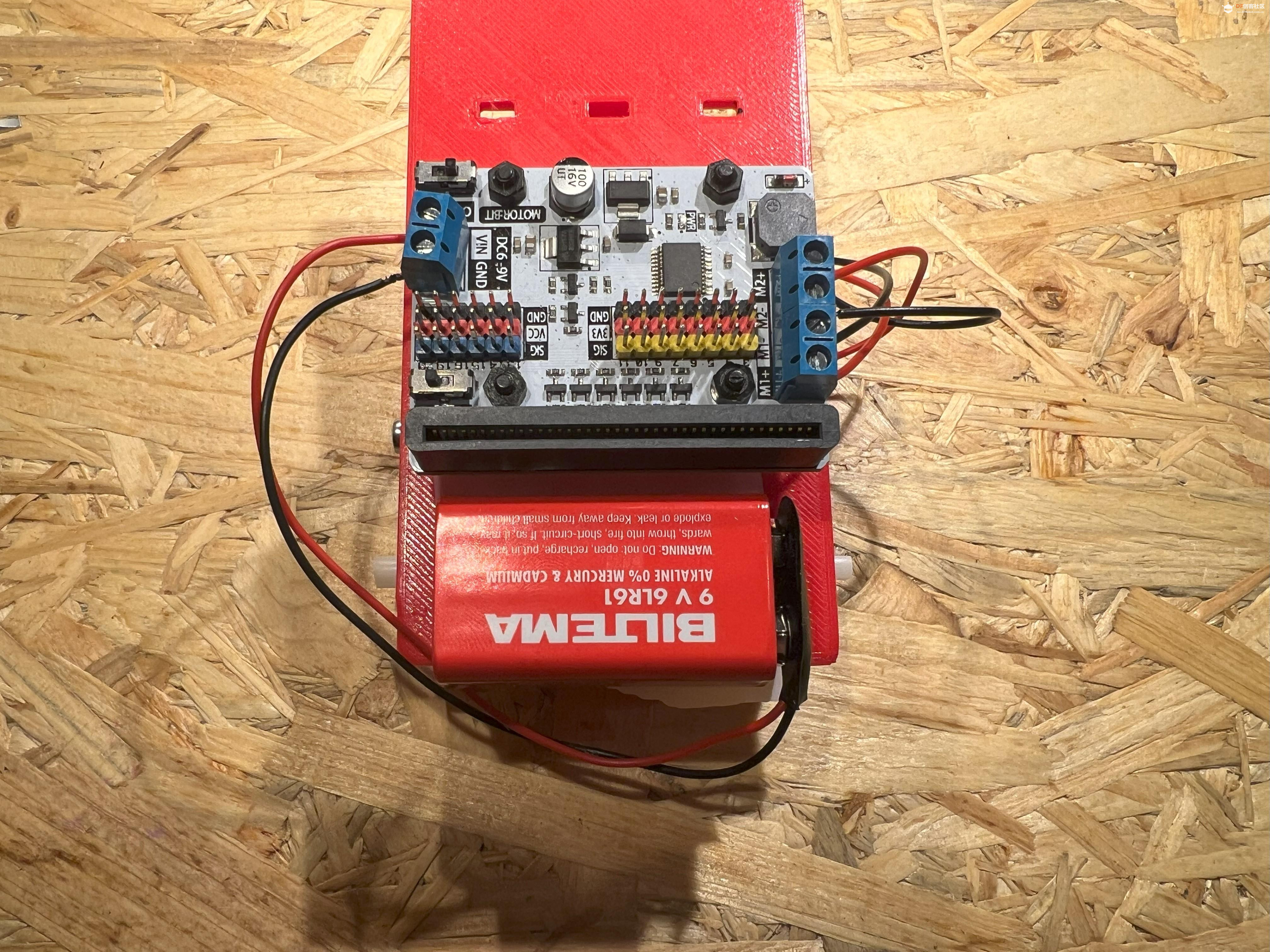
首先,如图所示,使用接线端子将两个电机连接到 motorbit 上。
然后,将电池座拧在 motorbit 上。黑线连接到 GND,红线连接到 VIN。然后取一小片双面胶带,贴在智能车的后部,将电池粘贴在上面。
## 步骤 6:安装车轮和Micro:bit
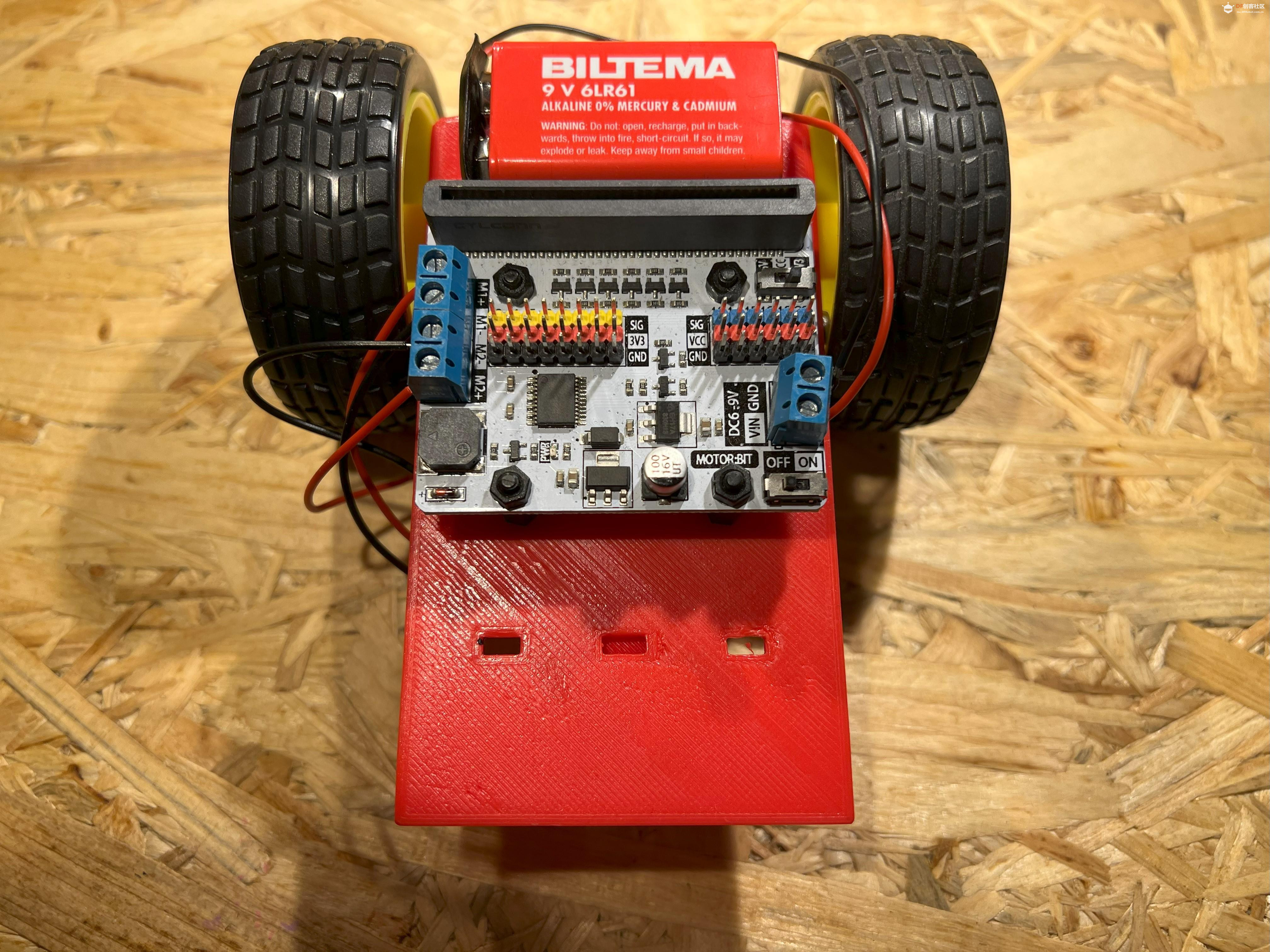
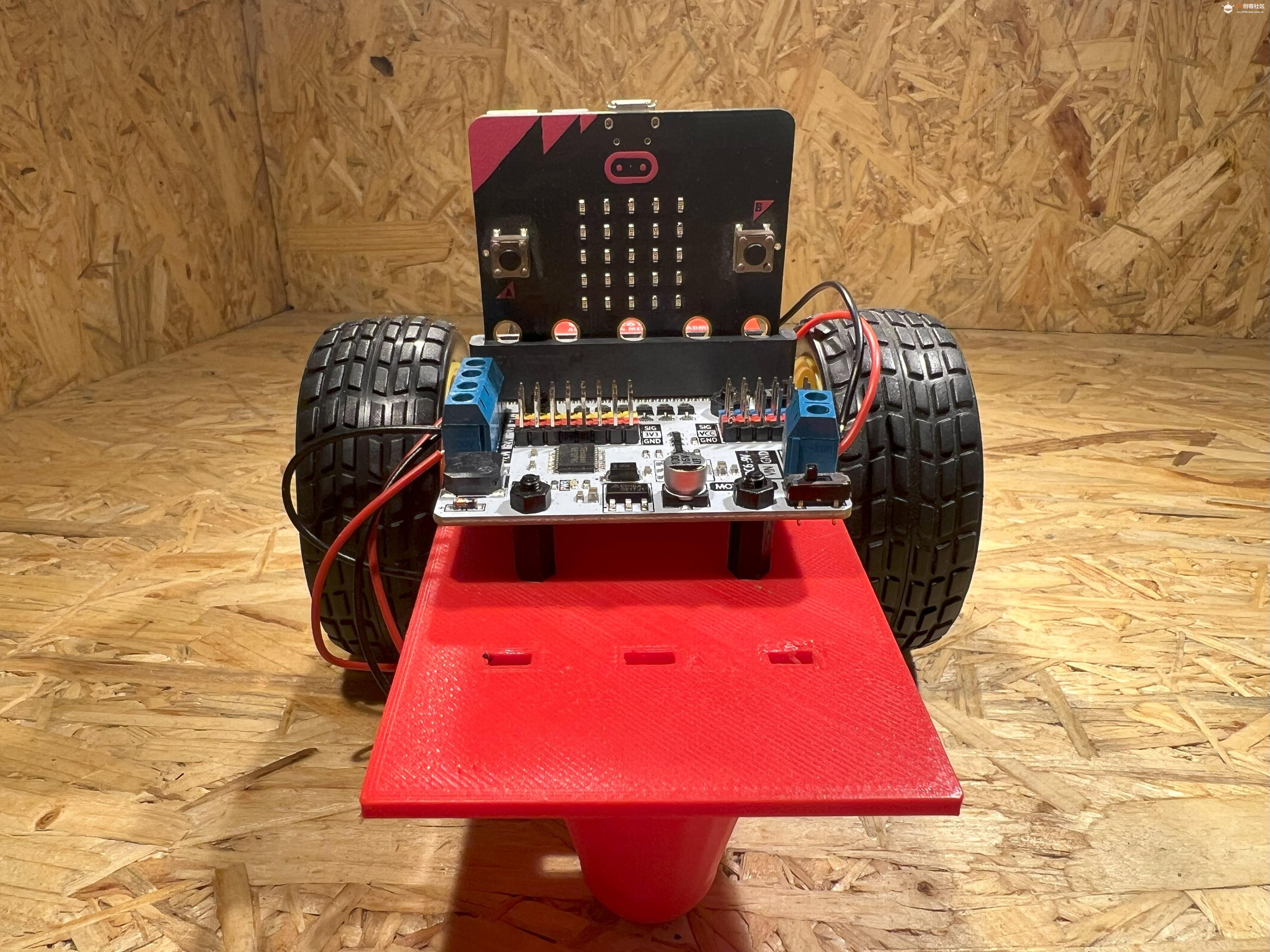
接着,将车轮推入电机中,将 Micro:bit 放入 motorbit 中。
现在,机架组装完成,机器人已经成型了。
## 步骤 7:前置模块
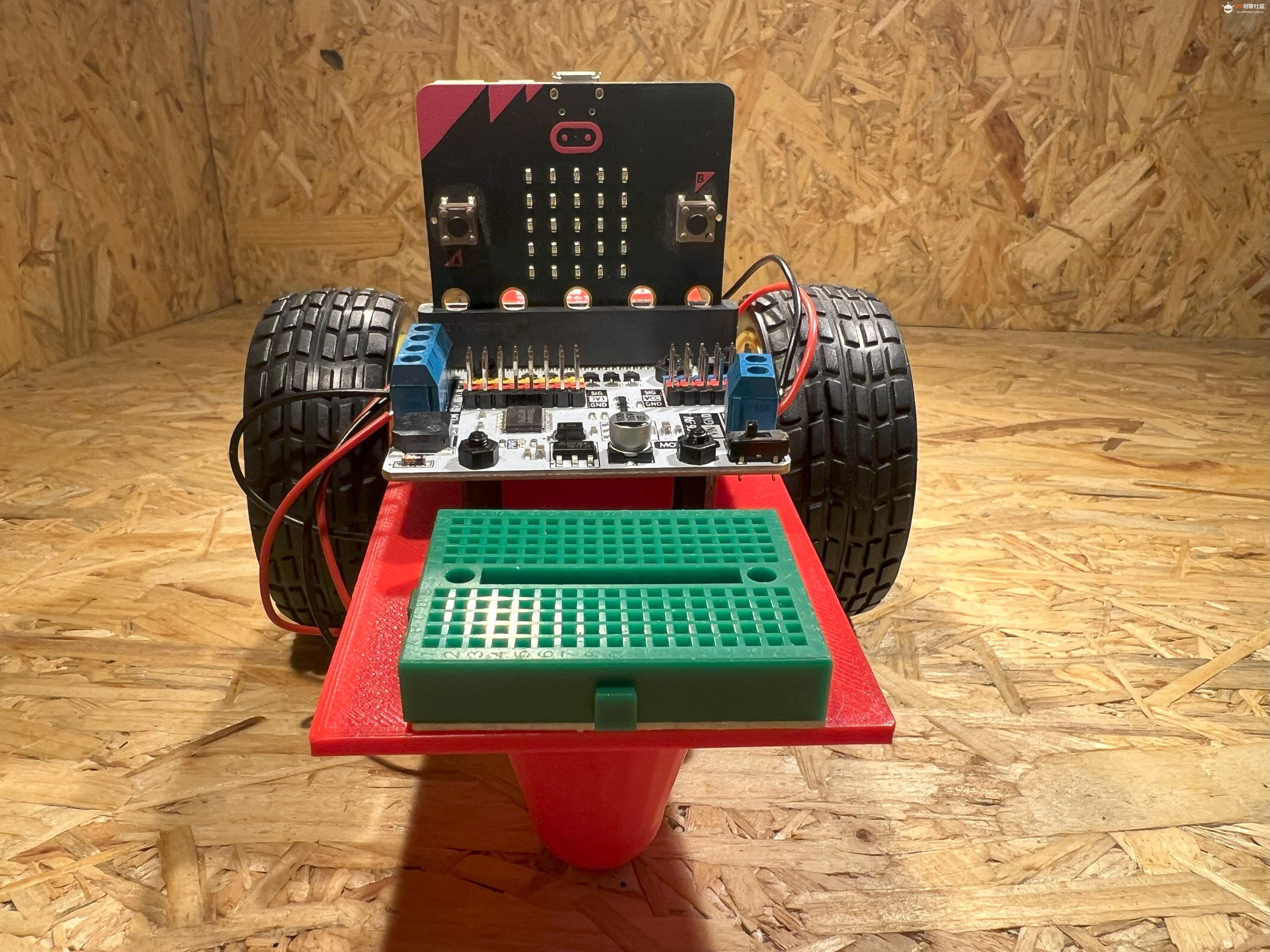



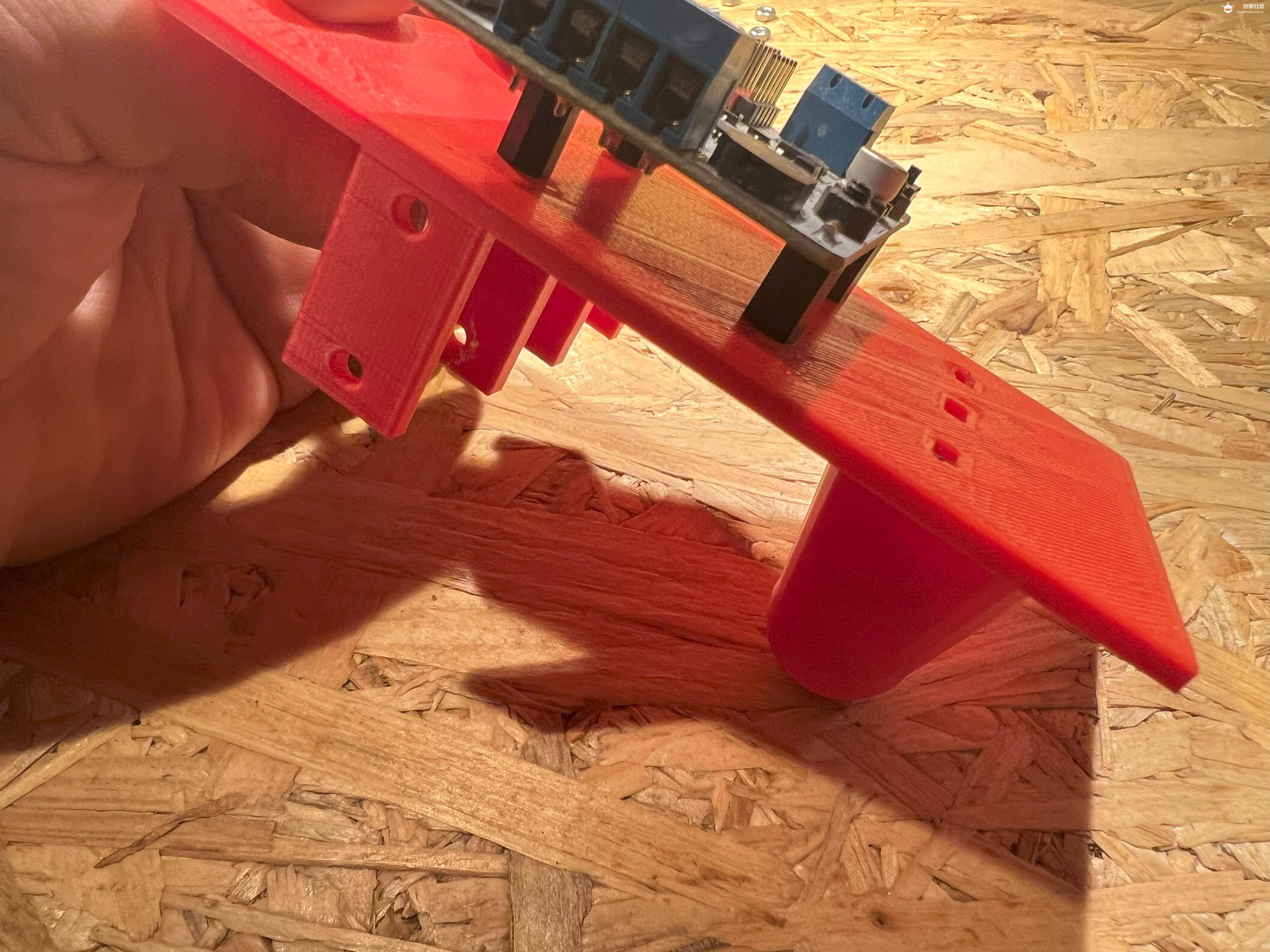
SiRo 2.0 一个很酷的地方是它没有转向轮,所以也没有固定转向轮的螺钉,因此,前部有宽裕的空间安装不同的模块。
最简单但也非常有效的方法就是在前面放置一个面包板,我设计了一些模块,可以安装直立的面包板、超声波传感器或其组合。
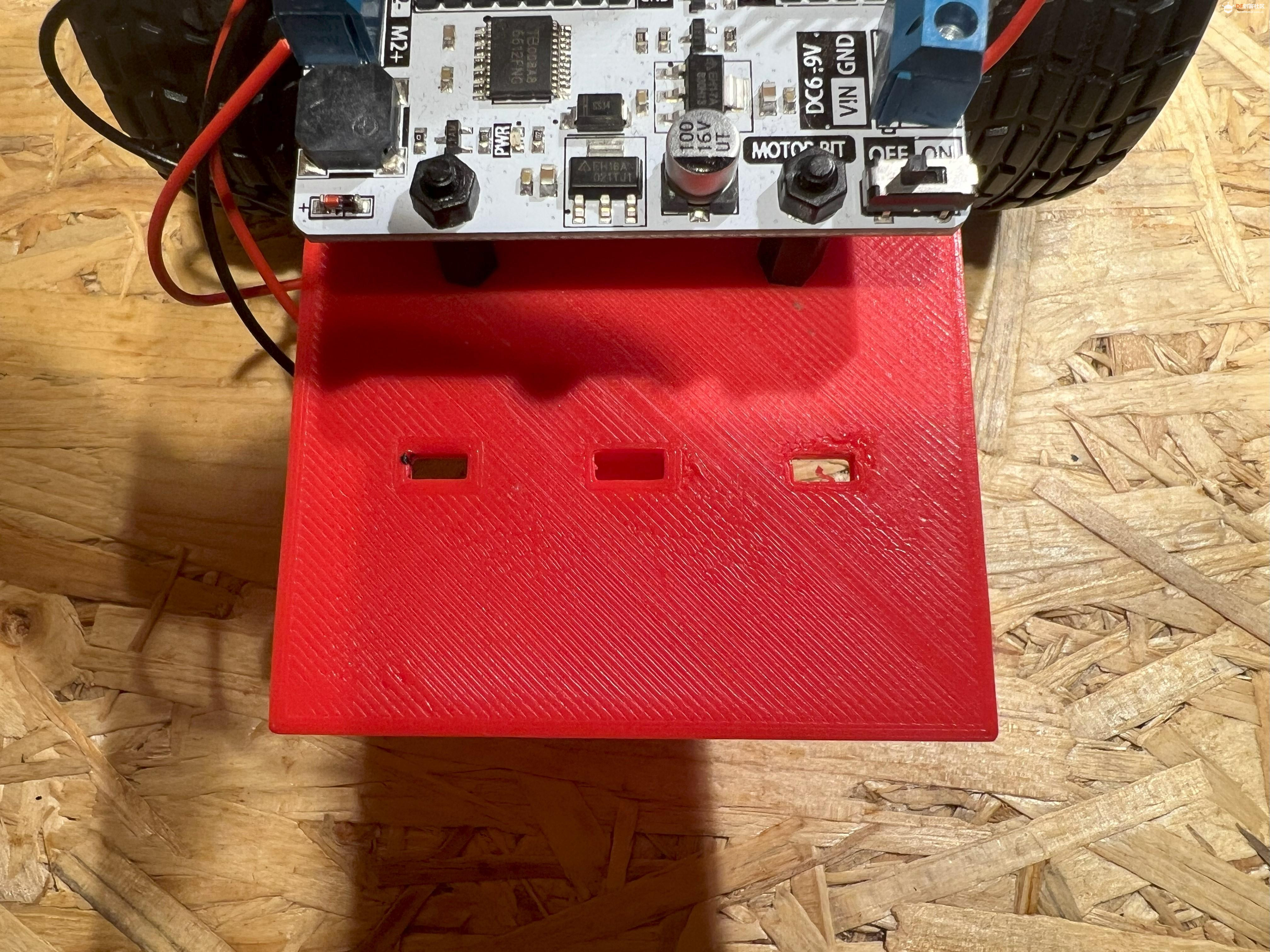
这些模块都可以通过将它们压入前部的三个孔中来进行安装。
## 步骤8:夹爪支架




家里刚好有一个廉价机器人的夹爪,所以我还设计了一个支架。打印出来后,用 3 个 3M 20mm 螺钉和 3 个螺母将夹爪安装在支架上。然后将支架安装在机器人上。
由于夹爪应该在支架上安装得相当紧,而我无法知道其他人的夹爪可能用多厚的塑料,所以我还制作了两个小薄片的3D打印塑料件,可以与夹爪一起放入。一个厚度为 1 毫米,另一个厚度为 0.5 毫米。
由于支架的开口为 5 毫米,如果您的夹爪由 4 毫米塑料制成,那么您可以将 1 毫米的薄片与抓取器一起放入,它应该会与支架紧套在一起。
## 步骤 9:示例程序
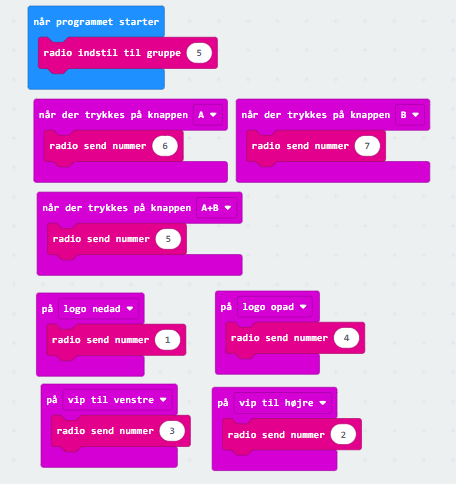


由于打算使用另一个 Micro:bit 控制我的机器人,我编写了一个简单的程序。 (抱歉,它是用丹麦语编写的)
首先,我转到 makecode.org 并编写了发送器 Micro:bit 的程序。
我为其分配了一个 radiogroup,并将其编程为根据我手持 Micro:bit 的角度以及是否按下 a 或 b 按钮发送不同的数字。
然后我编写了位于机器人上接收器 Micro:bit 的程序。
首先,我转到扩展并找到了 motorbit 扩展。然后,将其分配给与发送器相同的 radiogroup,并使其根据发送给它的数字执行不同的操作。
下面是这两个程序的下载链接。
[发送器程序](https://makecode.microbit.org/_9fdcgzMe9hec)
[接收器程序](https://makecode.microbit.org/_M84f9WTCsbR7)
## 步骤 10:抓取机器人
https://www.bilibili.com/video/BV1Mc41117aK/
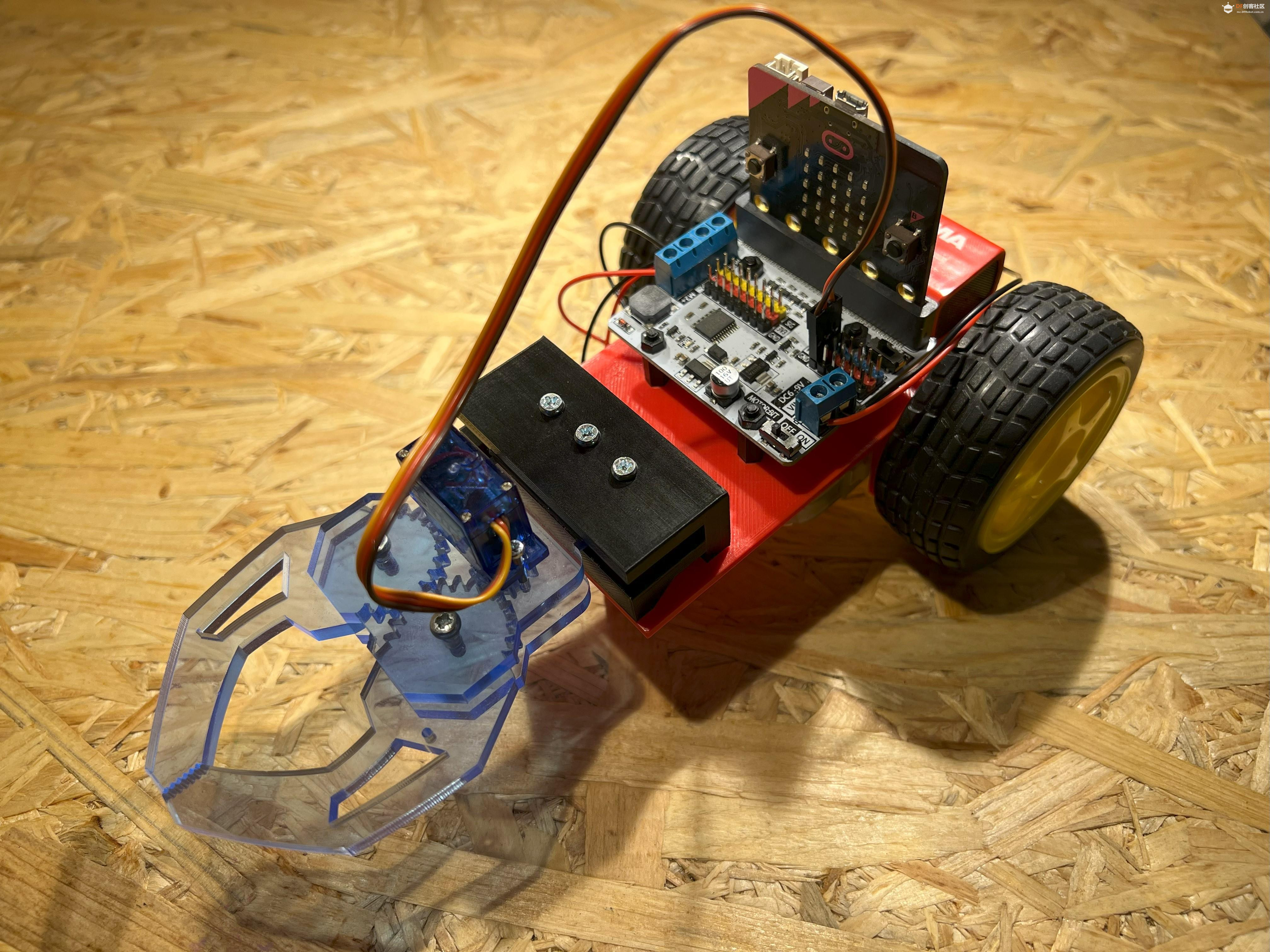
然后,将这两个程序下载到两个 Micro:bit 上,抓取机器人就完成了。
## 步骤 11:设计自己的模块
想要设计自己的模块也是相当容易。
要查看示例,可以在此处访问我的 [夹爪支架 thinkercad 文件](https://www.tinkercad.com/things/aLKG8rmWc67-clawholder?sharecode=vbDRZqa6LgLa16UBknRiH1RjOMWlNOBBipLQDG2nqkA),以及只包含需要[连接到机架的三个凸起的设计](https://www.tinkercad.com/things/3slvH2AVs25-studs?sharecode=rj6n-E2tqyjBpe2dYtvc1Do1-15tCmhYbQkBa6BNH8s)。
>英文链接:(https://www.instructables.com/SiRo-20-a-Cheap-3d-Printed-Robot-for-Microbit/)
>英文作者:(https://www.instructables.com/member/451Grader/)
>中文翻译:(https://mc.dfrobot.com.cn/home.php?mod=space&uid=835443&do=profile)

学习学习 很好,学习了 厉害厉害 我们都成了外文社的了, 学习下学习 666
页:
[1]